

未来行业核心逻辑:从分体式零散搭配 → 一体化系统级协同;单一性能参数竞争 → 电机、减速机、传感、控制全链路耦合优化;传统 RV / 谐波二元路线 → 混合驱动、新型传动多路线并行;硬件协同升级 + 智能算法深度绑定。
一、架构革命:分体电机 + 减速机全面转向一体化关节模组(最大产业趋势)
传统模式:伺服电机、减速机、刹车、编码器、驱动器分开采购、现场装配,同轴度、零点、惯量匹配依赖整机厂调试,协同误差大、装配成本高。
协同演进逻辑
无框力矩电机 + 减速机深度封装一体化电机定子直接嵌入减速机壳体,取消多余法兰、转接盘,出厂统一校准同轴度、零点、背隙,从硬件源头消除装配带来的协同偏差。
工业协作 / 人形上肢:无框电机 + 中空谐波一体化;
重载机器人大臂:大扭矩无框电机 + RV 一体化关节。
驱控传动三合一集成驱动器、FOC 电流环、减速机、力矩传感器内置同一关节,EtherCAT 实时同步,电机电流与减速机形变毫秒级联动补偿,控制带宽提升 3~5 倍。
产业价值变化整机厂无需单独匹配电机减速机,研发周期缩短 60%;系统振动、背隙漂移、惯量不匹配等协同故障大幅减少,综合成本下降 40% 以上;2034 年全球一体化关节市场规模将达 12.8 亿美元,复合增速 52%。

一体化关节模组对比
二、驱动路线分化:混合驱动架构成为主流,准直驱 QDD 开辟新协同方案
不再单一依靠「高速伺服 + 大速比谐波 / RV」,按负载场景分层匹配电机 - 减速机组合,形成三类成熟协同路线:
重载工业机器人(汽车焊装、码垛):高功率径向磁通伺服 + 高刚性 RV保留经典高减速比方案,持续优化扭矩余量、抗冲击协同;电机峰值扭矩匹配 RV3 倍过载能力,适配 24 小时强冲击量产。
精密轻载(3C、手腕、协作机器人):超薄轴向磁通电机 + 超低背隙谐波轴向磁通电机扁平化、轻量化,功率密度提升 40%,搭配超薄中空谐波,整机减重 50%;电机高速区间匹配谐波 100–160 大速比,极致衰减末端误差。
人形下肢、高速人机交互:准直驱 QDD(高扭矩密度电机 + 小速比 10–30 行星)低减速比大幅降低传动弹性形变,电机与负载近乎直接耦合,力控精度 ±0.5% FS;依靠电机高动态响应弥补减速机放大扭矩弱的短板,行走、跳跃动态协同性能碾压传统谐波方案。
新型传动替代路线:章动减速机 + 高扭矩电机全刚性啮合替代柔轮,兼具谐波紧凑与 RV 抗冲击,电机匹配方案可直接兼容现有谐波安装尺寸,解决谐波柔轮疲劳断裂痛点。
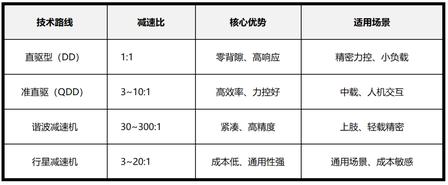
三大驱动路线参数对比
三、硬件协同性能升级:电机与减速机材料、结构双向耦合优化
二者不再独立研发,而是系统同步设计,围绕扭矩密度、轻量化、长寿命双向适配:
1. 电机侧适配减速机需求
低惯量转子设计:匹配 RV 允许最大惯量比≤20、谐波≤10,避免系统共振;
宽高效区间永磁电机:2000–7000rpm 全域高效率,适配减速机大速比降速,杜绝低速爬行;
耐高温定子绕组:匹配减速机连续满载温升,一体化关节无局部热失控。
2. 减速机反向适配电机特性
谐波柔轮采用高强钛合金 / 复合涂层,降低弹性形变,减少电机持续补偿力矩与发热;
RV 优化齿面修形,降低传动损耗,匹配电机 95%+ 高效率输出;
全系列中空标准化结构,适配电机出线、线缆一体化走线,消除悬臂偏载带来的协同精度漂移。
3. 轻量化协同(人形机器人核心刚需)
电机采用空心杯、轴向磁通方案,减速机拓扑镂空轻量化,整机关节重量降低 40%,同等电机扭矩下末端负载提升 30%,续航大幅延长。
四、控制层面深度协同:电机伺服算法与减速机力学特性绑定自适应控制
传统伺服 PID 通用参数无法适配不同减速机刚性,未来运动控制实现减速机感知式自适应伺服:
减速机刚性在线辨识,自动整定电机环路参数控制器实时采集电机电流、末端力矩信号,识别 RV 高刚性 / 谐波柔性差异,自动调整速度环、位置环增益、陷波滤波;谐波关节自动加大滤波抑制柔轮振动,RV 关节拉高增益提升响应速度,无需人工现场调试。
背隙、蠕变、热膨胀全链路联动补偿
换向时电机预走补偿量,抵消减速机背隙;
谐波静态蠕变:电机输出微力矩持续抵消柔轮形变,长时间持重无点位漂移;
关节温度传感器联动电机热补偿:电机与减速机温升同步修正零点偏移,冷 / 热机精度一致。
双闭环全域协同(电机内环 + 减速机末端力矩外环)减速机内置力矩传感器,直接采集真实输出负载,控制器同时修正电机电流、转角,消除传动链全部误差,绝对定位精度提升至 0.05mm 以内,满足离线编程、视觉高精度装配。
AI 预测性协同减振基于机器学习识别减速机谐振频率、磨损特征,电机提前输出反向补偿力矩,抑制高速运动波纹、打磨振纹,大幅延长减速机齿轮寿命。
五、智能化协同:电机 - 减速机一体化自诊断、数字孪生预测健康
电机与减速机状态数据打通,实现动力传动系统全生命周期智能协同运维:
电机采集电流波动、温升、振动数据;减速机采集力矩、齿面磨损特征;二者数据融合判断故障:
电机电流异常波动 = 减速机齿轮点蚀、润滑失效;
末端力矩持续漂移 = 减速机背隙扩大、零点偏移;
数字孪生实时映射电机扭矩输出与减速机负载状态,提前预判疲劳寿命,自动调整电机输出扭矩,降低过载磨损;
一体化关节内置边缘计算芯片,本地完成故障识别,无需上传上位控制器,故障响应毫秒级,产线停机时间大幅减少。
六、国产全链条自主协同:电机、减速机配套体系同步突破,替代进入系统级匹配阶段
过去国产电机、减速机单独追赶日系,存在匹配兼容差、协同性能断层;未来上下游同步研发成套方案:
谐波(绿的、同川)+ 国产无框伺服成套匹配,针对 3C、协作机器人优化速比、惯量;
RV(双环、秦川)配套国产大功率伺服,对标纳博 + 安川原厂协同性能,满足汽车焊装重载工况;
统一机械法兰、电气接口标准,实现国产电机与减速机无缝互换,打破日系零部件成套绑定壁垒;
成本协同下探:国产成套电机 + 减速机价格仅日系 60%,加速国内制造业、海外低端自动化市场渗透。
七、绿色节能协同:电机高效率 + 减速机低损耗双向降耗,长续航低发热
电机采用高磁密永磁、FOC 最优力矩控制,减速机优化齿形降低摩擦损耗,整套传动系统综合效率提升至 90% 以上;
静态持重节能协同:RV 机械自锁承担绝大部分负载,电机仅输出极小维持电流,空载 / 待机能耗降低 70%;谐波关节开启零漂积分补偿,避免持续大电流发热;
轻量化减少整机运动惯量,电机加减速能耗下降,人形机器人续航提升一倍;
低发热协同设计:一体化关节共用散热通道,电机热量传导至减速机壳体散热,取消独立散热风扇,缩小体积、降低噪音。
八、场景细分定制协同方案,不同行业专用电机 - 减速机匹配体系成熟
汽车焊装 / 打磨:大功率高压伺服 + 全轴高刚性 RV,伺服预留 50% 峰值扭矩余量,匹配冲击载荷;
3C / 半导体精密装配:微型轴向磁通伺服 + 超薄中空谐波,超高分辨率编码器配合 160 大速比,微米级定位;
人形机器人:腿关节 QDD 准直驱(高扭矩电机 + 小速比行星)、手臂谐波一体化模组、灵巧手空心杯微型谐波;
防爆喷涂、食品医药:防爆 / 低粉尘专用电机 + 密封防腐减速机,低噪音协同控制;
重型码垛物流:超大功率伺服 + 重载加厚轴承 RV,强化静态自锁协同,杜绝断电坠物。
趋势总结(一句话梳理核心主线)
硬件形态:分体搭配淘汰,一体化关节模组成为标准化主流;混合驱动(RV / 谐波 / QDD 准直驱)按场景分层;
设计逻辑:从电机、减速机单独设计 → 系统耦合同步开发,轻量化、高功率密度双向适配;
控制算法:伺服参数自适应减速机力学特性,力矩双闭环 + AI 减振实现全域高精度协同;
智能化:电机与减速机数据互通,自诊断、数字孪生预测传动寿命;
产业格局:国产成套电机减速机协同突破,实现全产业链自主可控,同时适配人形机器人全新增量市场。
